- Планетоход
-
 Исследовательский планетоход на Марсе
Исследовательский планетоход на Марсе
 Посадочный модуль, доставивший его на Марс
Посадочный модуль, доставивший его на МарсПланетоход — это космический аппарат, предназначенный для передвижения по поверхности другой планеты или небесного тела. Некоторые планетоходы были сконструированы для перемещения членов экипажа космической экспедиции; другие были дистанционно управляемыми, частично или полностью автономными роботами. Планетоходы доставляются на поверхность планеты при помощи специальных космических кораблей — посадочных модулей.
Содержание
Назначение
Все когда-либо использовавшиеся в космосе планетоходы были либо исследовательскими, либо транспортными. Теоретически возможно также использование планетоходов для проведения строительных работ, как передвижных ретрансляторов и передвижных убежищ. Кроме того, подобные планетоходам дистанционно управляемые аппараты могут использоваться на Земле для выполнения работы, опасной для людей — например, при разминировании или в условиях высокой радиоактивности.[1]
Преимущества и недостатки
Планетоходы обладают несколькими преимуществами перед неподвижными аппаратами: они обследуют бо́льшую территорию, могут уже в процессе работы направляться для исследования заинтересовавших учёных объектов, способны менять положение относительно Солнца, чтобы эффективно использовать солнечные батареи в зимний период. Кроме того, подобные аппараты вносят вклад в развитие систем дистанционного управления подвижными роботами.
Преимущества перед орбитальными аппаратами — это способность проводить исследования объектов размером вплоть до микроскопического и выполнять эксперименты. Недостатками по сравнению с орбитальными аппаратами является более высокая вероятность неудачи миссии, вследствие сложности посадки или других проблем и ограниченность исследуемой площади районом места приземления (который может быть задан лишь приблизительно).
Требования и особенности
Планетоходы доставляются на объект исследования космическими кораблями и работают в условиях, сильно отличающихся от земных. Это вызывает некоторые специфические требования к их устройству.
Надежность
Планетоход должен обладать стойкостью к перегрузкам, низким и высоким температурам, давлению, пылевому загрязнению, химической коррозии, космическому излучению, сохраняя работоспособность без ремонтных работ в течение необходимого для выполнения исследований времени.
 Марсоход «Соджонер» в сложенном виде
Марсоход «Соджонер» в сложенном видеКомпактность
Объём космических кораблей ограничен, поэтому в конструкции планетоходов и при их укладке уделяется внимание экономии пространства. Может складываться ходовая часть планетохода, либо аппарат в целом; также выполняется крепление аппарата к кораблю. Устанавливаются средства развертывания планетохода в рабочее положение и отделения от посадочного модуля. Так, крепления марсоходов «Спирит» и «Оппортьюнити» к их посадочным модулям удалялись при помощи небольших пиротехнических зарядов.
Дистанционное управление и автономность
Планетоходы (и другие аппараты), находящиеся на небесных телах, значительно удаленных от Земли, не могут управляться в режиме реального времени из-за значительной временной задержки приёма отправленных команд управления и сигналов обратной связи от аппарата. Задержка возникает, поскольку радиосигналу требуется время, чтобы дойти до удаленной планеты или от неё до Земли. Поэтому такие планетоходы способны некоторое время функционировать, в том числе передвигаться и выполнять исследования, автономно благодаря заложенному в них программному обеспечению, получая команды лишь время от времени.
 Время (1,28 секунды), за которое радиоволна, пущенная с Земли, достигает Луны. Рисунок выполнен в масштабе.
Время (1,28 секунды), за которое радиоволна, пущенная с Земли, достигает Луны. Рисунок выполнен в масштабе.Варианты конструкции

Этот раздел не завершён. Вы поможете проекту, исправив и дополнив его.Создатели планетоходов
- А. Л. Кемурджиан, советский инженер-конструктор. Организовал группу конструкторов во ВНИИтрансмаш, заложил основы проектирования планетоходов как робототехнических транспортных машин космического назначения. В 1992 году поддержал создание Научно-технического закрытого акционерного общества «Ровер» (ныне ЗАО «НТЦ „Ровер“ им. А. Л. Кемурджиана»)[2].
- Стивен Сквайрес (en:Steve Squyres, профессор Корнелльского университета) и руководимая им команда — создатели марсоходов «Спирит» и «Оппортьюнити».
 Стив Сквайрес (в центре) радуется получению снимков со «Спирита»
Стив Сквайрес (в центре) радуется получению снимков со «Спирита»Этот раздел не завершён. Вы поможете проекту, исправив и дополнив его.Запущенные планетоходы
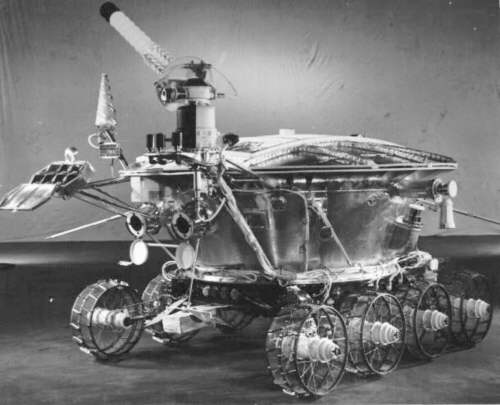
 Луноход-1
Луноход-1Луноход-1
Первый планетоход, Луноход-1, был доставлен на поверхность Луны 17 ноября 1970 года автоматической межпланетной станцией Луна-17. Предназначался для изучения особенностей лунной поверхности, радиоактивного и рентгеновского космического излучения на Луне, химического состава и свойств грунта. Успешно проработал до 14 сентября 1971 года, после чего вышел из строя. За время нахождения на поверхности Луны проехал 10 540 м, передал на Землю 211 лунных панорам и 25 тысяч фотографий. Более чем в 500 точках по трассе движения изучались физико-механические свойства поверхностного слоя грунта, а в 25 точках проведён анализ его химического состава[3].
Лунные автомобили программы «Аполлон»
Лунные автомобили — это планетоходы, использовавшиеся на Луне в рамках программы «Аполлон» для обеспечения большей подвижности экипажей экспедиций Аполлон-15 (прилунение состоялось 30 июля 1971 г.), Аполлон-16 (прилунение состоялось 21 апреля 1972 г.) и Аполлон-17 (прилунение состоялось 11 декабря 1972 г.) Вездеходы значительно расширили доступную для астронавтов площадь лунной поверхности. Ранее астронавты могли перемещаться на Луне лишь непосредственно вокруг места посадки из-за сковывавших их скафандров и других приборов жизнеобеспечения. Пользуясь же вездеходом, можно было развивать скорость до 13 км/ч.
 Луноход-2
Луноход-2Луноход-2
Второй советский лунный дистанционно-управляемый вездеход был доставлен на поверхность Луны 16 января 1973 года автоматической межпланетной станцией Луна-21. Он был предназначен для изучения механических свойств лунной поверхности, фотосъёмки и телесъёмки Луны, проведения экспериментов с наземным лазерным дальномером, наблюдений за солнечным излучением и других исследований. Аппарат проработал около четырёх месяцев, за это время было проведено 60 сеансов радиосвязи, получено 86 панорам и более 80 тысяч телевизионных снимков лунной поверхности. Были также получены стереоскопические изображения наиболее интересных особенностей лунного рельефа, позволившие провести детальное изучение его строения. В последний раз телеметрическая информация от аппарата была принята 10 мая 1973 года.
ПрОП-М
Прибор оценки проходимости — Марс (ПрОП-М) — название советских марсоходов, которые должны были быть доставлены на поверхность Марса в 1971 году автоматическими межпланетными станциями «Марс-2» (27 ноября) и «Марс-3» (2 декабря), однако их миссия сорвалась. Спускаемый аппарат «Марс-2» разбился при посадке, а «Марс-3» проработал только 20 секунд. Среди других запущенных планетоходов выделяются прежде всего своей системой передвижения: переместиться на метр от посадочного модуля аппараты должны были при помощи двух шагающих «лыж», размещенных по бокам. Такая система была выбрана из-за отсутствия сведений о поверхности Марса.[4]
 Марсоход «Sojourner»
Марсоход «Sojourner»Соджонер
Марсоход «Соджонер» являлся частью миссии аппарата «Марс Патфайндер», совершившего посадку на Марсе 4 июля 1997 года. Это был первый случай удачной работы марсохода. За время своей работы, продолжавшейся до 27 сентября 1997 года, этот небольшой марсоход сделал и передал 550 фотографий и более 15 раз провел химический анализ марсианских камней и грунта.
Текущие экспедиции
 Mars Exploration Rover
Mars Exploration RoverMars Exploration Rover
Mars Exploration Rover — продолжающаяся в настоящий момент миссия по исследованию Марса двумя одинаковыми марсоходами «Спирит» и «Оппортьюнити». Посадочный модуль со «Спиритом» совершил посадку на Марсе 4 января 2004 г., марсоход проработал по 22 марта 2010 года, модуль с «Оппортьюнити» — 25 января 2004 г., аппарат работает по настоящее время. Задача миссии — изучение поверхности Марса и его геологии. Основные цели — обнаружение и описание различных типов скал и грунтов, содержащих следы существования воды на этой планете.
 Mars Science Laboratory
Mars Science LaboratoryMars Science Laboratory
Mars Science Laboratory — миссия НАСА по доставке на Марс и эксплуатации марсохода третьего поколения Кьюриосити (рус. Любопытство/Любознательность), представляющего собой автономную химическую лабораторию в несколько раз больше и тяжелее предшественников. Аппарат должен будет за несколько месяцев пройти от 5 до 20 километров и провести полноценный анализ марсианских почв и компонентов атмосферы. Запуск Кьюриосити к Марсу состоялся 26 ноября 2011 года, мягкая посадка на поверхность Марса — 6 августа 2012. Предполагаемый срок службы на Марсе — 1 марсианский год (686 земных суток). Вместо традиционных для планетоходов солнечных батарей в качестве источника энергии будет использоваться радиоизотопный термоэлектрический генератор.
Планируемые экспедиции и прототипы
Чандраян-2
В рамках экспедиции Чандраян-2 планируется использование шестиколесного лунохода весом 58 кг оснащенного солнечными батареями для изучения района южного полюса Луны в течение одного года[5].
Чанъе-3
В 2013 году Китай планирует приступить к исследованиям Луны с помощью лунохода. Сейчас разрабатывается эскизный проект.
Луна-Грунт
В рамках миссии «Луна-Грунт» Россия планирует отправку в 2015—2017 нескольких луноходов массой 300 кг.
ExoMars
Для участия в миссии ExoMars Европейским космическим агентством разрабатывается марсоход весом 271 кг. Он будет искать жизнь на Марсе с помощью бура и научного комплекта «Pasteur». В качестве источника энергии будет оснащен солнечными батареями. Запуск его к Марсу в настоящее время планируется на 2018 год[6].
Марс-Астер
Россия разрабатывает свой марсоход для запуска в 2018 году. Его прототипы уже испытывались в пустыне Мохаве и на Камчатке в 1988—1994 годах. Все это время образцы, готовые к полету лежали на складе. Теперь их готовят к запуску на ракете-носителе «Союз-2» в 2018 году.
Lunar Electric Rover
 Lunar Electric Rover — транспортный луноход размером с грузовик
Lunar Electric Rover — транспортный луноход размером с грузовикНебольшой вездеход с 6 ведущими колёсными осями. Аппарат работает от аккумуляторов, позволяющих в условиях лунной гравитации и поверхности развивать ему скорость до 10 км/час. В герметичной кабине устроены места для двух астронавтов и небольшой отсек для грузов.
ATHLETE
 Луноход ATHLETE в тестовой лаборатории JPL. Август 2008 года
Луноход ATHLETE в тестовой лаборатории JPL. Август 2008 года(дословно «Аппарат для исследования внеземных поверхностей любого типа, снабженный шестью конечностями») — автоматический шестиногий транспортный вездеход, разрабатываемый Jet Propulsion Laboratory (JPL) и NASA.
Венероход
США разрабатывают планетоход для запуска на Венеру в 2027 году.
 Венероход
ВенероходПрочие планетоходы
Планетоходы, запуск которых не состоялся:
 Луноход-3 в музее
Луноход-3 в музееЛуноход-3
Третий советский аппарат из серии Луноход планировалось доставить на Луну в 1977 году при помощи межпланетной станции Луна-25, но её запуск не состоялся. Впоследствии Луноход-3 так и не был отправлен на Луну. В настоящее время он находится в музее НПО имени Лавочкина.
Наноровер
Изначально в японской миссии «Хаябуса» планировался и наноровер — миниатюрный самоходный робот, который должен был спустится с основного зонда на поверхность астероида и исследовать его в нескольких местах. Несмотря на то, что он был очень маленьким, на нём размещалось 4 научных инструмента. Но в ноябре 2000 года проект был закрыт по финансовым причинам.
Примечания
- ↑ Планетоходы прошлого и будущего
- ↑ Научно-техническое общество «Ровер»
- ↑ 35 лет назад советский космический аппарат «Луноход-1» высадился на поверхность Луны
- ↑ Внеземной транспорт: Планетоходы
- ↑ Russia Plans Ambitious Robotic Lunar Mission
- ↑ Европейское космическое агентство отложило запуск марсохода ExoMars до 2018 года
Источники
- Планетоходы / А. Л. Кемурджиан, В. В. Громов, И. Ф. Кажукало и др.; под ред. А. Л. Кемурджиана — М., Машиностроение, 1993.
- How Lunar Rovers Work — статья на сайте HowStuffWorks.
- Луноход-1: Горелово — Тюра-Там — Луна. До востребования
См. также
Робототехника Основные статьи Робот • Мехатроника Типы роботов Промышленный робот • Сельскохозяйственный робот • Бытовой робот (робот-пылесос) • Боевой робот • Андроид (гиноид) • Персональный робот • Социальный робот • БПЛА • Планетоход • Наноробот Известные роботы ASIMO • AIBO • Roomba • Pleo • Aiko • PackBot • BigDog • QRIO • TOPIO • HRP Связанные термины Групповая робототехника • Устройство телеприсутствия • Киборг • Шагоход • Мех (бронетехника) Категория:- Планетоходы














Wikimedia Foundation. 2010.